|
News
2025-09: My team won The First Place 🏆 in CVPR 2025 Embodied AI Workshop
2025-05: My team won The First Place 🏆 in ICRA 2025 What Bimanuals Can Do (WBCD) Challenge
2025-03: My team won the Champion 🏆 in ManiSkill-ViTac 2025: Challenge on Manipulation Skill Learning With Vision and Tactile Sensing
2024-07: GuassianGrasper was accepted to RA-L
2024-02: Block-Map-Based Localization in Large-Scale Environment was accepted to ICRA 2024
|
|
Research Interests
🤖Robotics
Embodied AI
Manipulation
VLA
Tactile
Mapping and Navigation
|
Education
.jpg)
|
the Hong Kong University of Science and Technology (Guangzhou)
Master of Philosophy (General) (2025.9 - present)
|

|
Liverpool John Moores University, UK
B.E Electrical and Electronic Engineering (2019-2023)
|
Research Experience

|
TARS Technology (Shanghai) Co., LTD.
|

|
Institute for AI Industry Research (AIR), Tsinghua University
|

|
GAIRLAB, City University of Hong Kong (CityU)
|

|
EncoSmart Technology (Beijing) Co., LTD
Research Intern
(2023.11 - 2024.2, 2024.7 - 2024.11)
|
|
(†: corresponding author; *: equal contribution)

|
RoboGEM: Learning Language-guided Robotic Manipulation via Generalizable and Efficient Feature Distillation
Chunzheng Wang,
Yuhang Zheng,
Xiangyu Chen,
Weize Li,
Songen Gu,
Yupeng Zheng.
ACM International Conference on Multimedia (MM) 2025
RoboSoft'25 Workshop (Oral) Best Paper Finalist (Certificate)
|
|
GaussianGrasper: 3D Language Gaussian Splatting for Open-vocabulary Robotic Grasping
Yuhang Zheng,
Xiangyu Chen,
Yupeng Zheng,
Songen Gu,
Runyi Yang,
Bu Jin,
Pengfei Li,
Chengliang Zhong,
Zengmao Wang,
Lina Liu,
Chao Yang,
Dawei Wang,
Zhen Chen,
Xiaoxiao Long†,
Meiqing Wang†.
RA-L, 2024
Homepage ·
📑Paper ·
Code
We introduced GaussianGrasper, a robot grasping system implemented by a 3D Gaussian field endowed with open-vocabulary semantics and accurate geometry that is capable of rapid updates to support open-world robotic grasping guided by language.
|
|
Block-Map-Based Localization in Large-Scale Environment
Yixiao Feng,
Zhou Jiang,
Yongliang Shi,
Yunlong Feng,
Xiangyu Chen,
Hao Zhao,
Guyue Zhou.
ICRA 2024
🎬Video ·
📑Paper ·
Code
we propose a localization system based on
Block Maps (BMs) to reduce the computational load caused by
maintaining large-scale maps.
|

|
Mobile Manipulation in household tasks
Xiangyu Chen (cooperated with YueXiu Company)
Whole Body Control
VR Teleoperation
Media: Yuexiu Property
|
|
Humanoid Unitree G1 RL locomotion
Xiangyu Chen (Independent Project)
Algorithm: Reinforcement Learning (PPO)
Simulation: Isaac Gym, Mujoco
I implemented reinforcement learning (PPO) algorithm using the rsl_rl library and Isaac Gym to train locomotion policy, and use Mujoco Simulation to test the policy
|
|
ICRA 2025 What Bimanuals Can Do (WBCD) Challenge
Hierarchical Bimanual Manipulation Policy for Dining Room Service
Weize Li,
Zhengxiao Han,
Lixin Xu,
Xiangyu Chen,
Harrison Bounds,
Chenrui Zhang,
Yifan Xu,
ICRA 2025
🏆
The First Place (Certificate)
Media: 甲子光年 | 36氪 | 机器之心 | 量子位 | ARX方舟无限
|
|
ManiSkill-ViTac 2025: Challenge on Manipulation Skill Learning With Vision and Tactile Sensing
Champion 🏆 in Track 2: Tactile-Vision-Fusion Manipulation (Certificate)
The First Place 🏆 in CVPR 2025 Embodied AI Workshop(Certificate)
TARS-STEIIA Team
Team Leader: Ruihai Wu
Instructor: Xiaoxiao Long
Members
Xiang Xiao*, Yuxing Qin*,
Yuhang Zheng*,
Xiangyu Chen
|
|
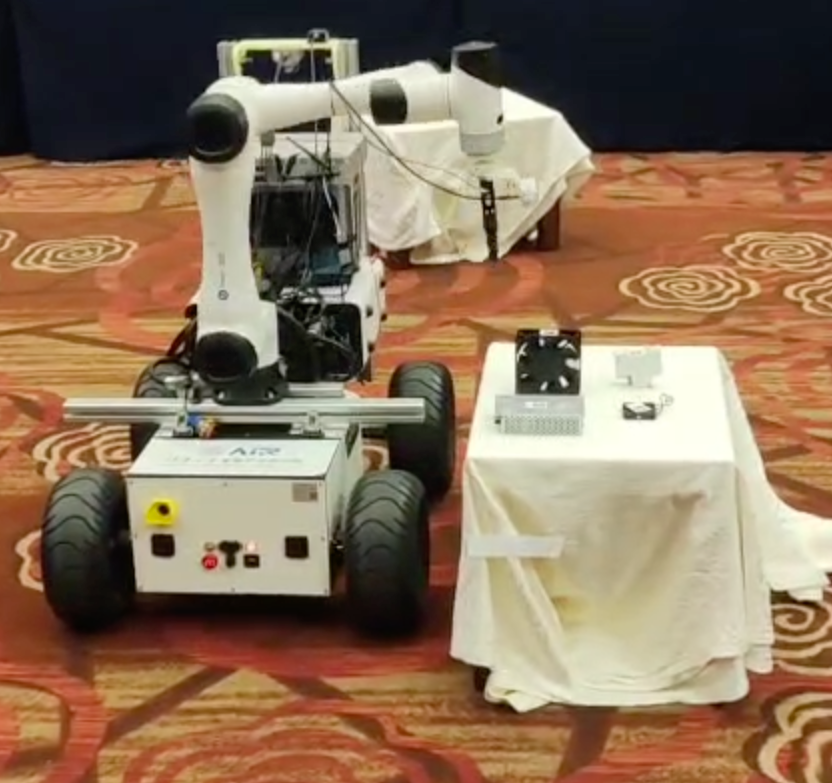
Mobile Manipulation with Imitation Learning
GAIRLAB, City University of Hong Kong (CityU)
Kaixin Chai,
Xiangyu Chen,
Yufeng Li,
Peng Yin*
🎬Video
Imitation Learning(ACT)
Data Collection by Teleoperation System
Whole-Body Control
|
|
Wheel-legged Robot dynamics obstacle avoidance
Xiangyu Chen,
Yufeng Li(Hardware Design)
🎬Video
Contribution:
Lidar-based SLAM (Cartographer)
Navigation (A* and TEB)
|
|
Wheel-legged Robot static obstacle avoidance
Xiangyu Chen,
Yufeng Li(Hardware Design)
🎬Video
Contribution:
Lidar-based SLAM (Cartographer)
Navigation (A* and TEB)
|
|
Navigation in 3D Large-Scale Environment
DISCOVER Lab, AIR, Tsinghua University
Xiangyu Chen,
Yixiao Feng,
Yunlong Feng,
Yongliang Shi,
Guyue Zhou
Lidar-based SLAM (LIO-SAM)
block-based-localizaton
Navigation (A* and TEB)
|
|
Leader-Follower Multi-Agent Swarm (Sim2Real Transfer)
Zhengxiao Han,
Jingtian Deng,
Chenghao Lin,
Xiangyu Chen,
Tianao Ren
Guyue Zhou
Lidar-based SLAM (Cartographer)
Pure Pursuit algorithm
High stability and obstacle avoidance ability
|
|
Dynamics Obstacles Avoidance Indoor
DISCOVER Lab, AIR, Tsinghua University
Xiangyu Chen,
Zhengxiao Han,
Yixiao Feng,
Guyue Zhou.
Lidar-based SLAM (Cartographer), Vision-based SLAM (ORB_SLAM, RTAB_MAP)
Extended Kalman Filter (EKF)
Navigation (A* and TEB)
|
|
Cyberdog Navigation in indoor environment
DISCOVER Lab, AIR, Tsinghua University
Xiangyu Chen,
Zhengxiao Han,
Guyue Zhou
🎬Video
Lidar-based SLAM (Cartographer)
Extended Kalman Filter (EKF)
Navigation (A* and TEB)
|
|
Cyberdog SLAM in indoor environment
DISCOVER Lab, AIR, Tsinghua University
Xiangyu Chen,
Zhengxiao Han,
Guyue Zhou
🎬Video
Lidar-based SLAM (Cartographer)
|

|
End-to-end Visual Navigation
DISCOVER Lab, AIR, Tsinghua University
Guan Wang,
Haoyi Niu,
Xiangyu Chen,
Guyue Zhou
🎬Video
Reinforcement Learning
Sim2Real
|
|
Simulation
|
|
Slave Obstacle Avoidance
Gazebo
Jingtian Deng,
Xiangyu Chen,
Guyue Zhou
Artificial Potential Field Method
|
|
Wheeled-Legged Navigation
Isaac Sim
Zhengxiao Han,
Xiangyu Chen,
Guyue Zhou
|
|
Cooperation with iFytek: VLM for Mobile Manipulation
Pengfei Li,
Xiangyu Chen,
🎬Video
The industrial compound mobile robot, enhanced by the capabilities of the Antelope Industrial Large Model in understanding computations, generating industrial code, and processing industrial text, can perform task comprehension, decomposition, instruction generation, and other operations through applications such as industrial task splitting, path code planning, and industrial object detection and image segmentation within a natural language interaction model. This further enhances the efficiency and effectiveness of industrial robots.
|
|
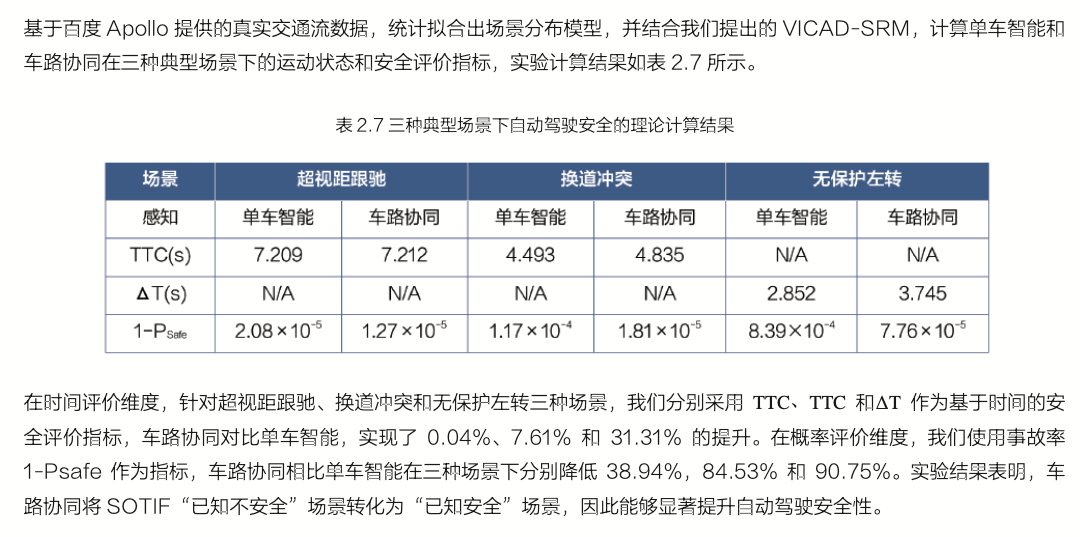
Baidu Apollo V2X Vehicle-Road Cooperative Technology Model Construction and Validation
Website
Contribution & Results: we developed a safety model based on two scenarios: ring road conflicts and unprotected left turns, and evaluated the safety performances in both individual vehicle intelligence and V2X scenarios. The results indicate that V2X improved safety metrics by 30% to 90%.
Result: In collaboration with Baidu, contributed to the release of the first Chinese white paper on vehicle-road cooperative technology: Key technologies and prospects of vehicle-road collaboration for autonomous driving.
|
|
Awards
City Special Prize, "Unbounded·2023 Shanghai International Student (Nationalized University Students) Innovation and Entrepreneurship Competition"
City Top 10, Best Popularity Award, Second and Third Prizes, 2020、2022 China-U.S. Maker Competition (Shanghai Regional)
Third Prize, 2021 Cross-Strait Maker Competition National Finals
City Second and Third Prizes, 2019、2022 Shanghai College Student Maker Competition
First Prize (National Level), 2017 International Youth Innovation Design Competition China Region
|
|
Hobbies
Outside of research, I enjoy playing basketball.
|
© Xiangyu Chen | Last update: Oct.9, 2025
| |




{kind=link}