 Rednote
Rednote
{kind=link}
I’m Xiangyu CHEN, a first-year MPhil student at the Humanoid Computing Lab(HCLab), at Thrust of Robotics And Autonomous Systems in the Hong Kong University of Science and Technology (Guangzhou), where I am co-advised by Prof. Renjing Xu and Prof. Haoang Li. Before that, I was a research intern at TARS Robotics and Institute for AI Industry Research (AIR), Tsinghua University, co-advised by Prof. Yilun Chen and Prof. Wenchao Ding. Earlier in my academic journey, I obtained First Class Honour Bachelor’s degree in Electrical and Electronic Engineering from Liverpool John Moores University in the UK.
Research Interests
- Data Collection
- Tactile
- Dexterous Manipulation
- VLA
- Mapping and Navigation
News
- 2026.06: My team won the First Place 🏆 in the ICRA 2026 What Bimanuals Can Do (WBCD) Challenge (Vienna).
- 2026.04: My team won the Third Place 🥉 & Robot Warrior Speed Award, and the Robot Warrior Intelligent Mobility Award 🏆 in the Robot Warrior Challenge 2026.
- 2025.11: I am honored to be a co-organizer for ICRA 2026 What Bimanuals Can Do (WBCD) Challenge.
- 2025.09: My team won the First Place 🏆 in the CVPR 2025 Embodied AI Workshop.
- 2025.05: My team won the First Place 🏆 in the ICRA 2025 What Bimanuals Can Do (WBCD) Challenge.
- 2025.03: My team won the Champion 🏆 title in ManiSkill-ViTac 2025: Challenge on Manipulation Skill Learning With Vision and Tactile Sensing.
- 2024.07: GaussianGrasper was accepted to RA-L.
- 2024.02: Block-Map-Based Localization in Large-Scale Environment was accepted to ICRA 2024.
Education
-
 the Hong Kong University of Science and Technology (Guangzhou) 2025.09 - presentMphil in ROAS Thrust
the Hong Kong University of Science and Technology (Guangzhou) 2025.09 - presentMphil in ROAS Thrust -
 Liverpool John Moores University, UK 2019 - 2023B.E. in Electrical and Electronic Engineering
Liverpool John Moores University, UK 2019 - 2023B.E. in Electrical and Electronic Engineering
Research Experience
-
 BrainCo Technology Co., Ltd. 2025.12 - 2026.07Research Intern
BrainCo Technology Co., Ltd. 2025.12 - 2026.07Research Intern -
 TARS Technology (Shanghai) Co., LTD. 2025.03 - 2025.12Research Intern, supervised by Prof. Yilun Chen and Prof. Wenchao Ding.
TARS Technology (Shanghai) Co., LTD. 2025.03 - 2025.12Research Intern, supervised by Prof. Yilun Chen and Prof. Wenchao Ding. -
 Institute for AI Industry Research (AIR), Tsinghua University 2021.06 - 2023.12, 2024.12 - PresentResearch Intern, supervised by Prof. Yilun Chen and Prof. Guyue Zhou.
Institute for AI Industry Research (AIR), Tsinghua University 2021.06 - 2023.12, 2024.12 - PresentResearch Intern, supervised by Prof. Yilun Chen and Prof. Guyue Zhou. -
 GAIRLAB, City University of Hong Kong (CityU) 2024.03 - 2024.06Research Assistant, supervised by Prof. Peng Yin.
GAIRLAB, City University of Hong Kong (CityU) 2024.03 - 2024.06Research Assistant, supervised by Prof. Peng Yin. -
 EncoSmart Technology (Beijing) Co., LTD. 2023.11 - 2024.02, 2024.07 - 2024.11Research Intern
EncoSmart Technology (Beijing) Co., LTD. 2023.11 - 2024.02, 2024.07 - 2024.11Research Intern -
 ARX Fangzhouwuxian (Beijing) Co., LTD. 2021.08 - 2023.02ex-Founding Team Members
ARX Fangzhouwuxian (Beijing) Co., LTD. 2021.08 - 2023.02ex-Founding Team Members
Publications
(†: corresponding author; *: equal contribution)
DreamTrajectory: Trajectory-Guided Action Generation with World Model Alignment for Mobile Manipulation
We propose DreamTrajectory, a trajectory-guided action generation framework with world model alignment for mobile manipulation.
Beyond Viewpoint Generalization: What Multi-View Demonstrations Offer and How to Synthesize Them for Robot Manipulation?
We study how multi-view demonstrations improve robot manipulation beyond viewpoint robustness, and propose RoboNVS, a geometry-aware framework that synthesizes novel-view demonstrations from monocular videos.

RoboGEM: Learning Language-guided Robotic Manipulation via Generalizable and Efficient Feature Distillation
RoboSoft'25 Workshop (Oral), Best Paper Finalist.
{kind=link}
GaussianGrasper: 3D Language Gaussian Splatting for Open-vocabulary Robotic Grasping
We introduced GaussianGrasper, a robot grasping system built on a 3D Gaussian field with open-vocabulary semantics and accurate geometry for fast, open-world language-guided grasping.
Competitions
ICRA 2026 What Bimanuals Can Do (WBCD) Challenge (Vienna)
Track 4 Deformable Manipulation
Team Leader: Xiangyu Chen
Supervisor: Prof. Renjing Xu
Team Members: Boyang Cai, Jinru Song, Xuanyu Lai, Xiangzheng Wang, Jiawei Xia, Wenxuan Song
{kind=link}
Robot Warrior Challenge 2026
Wheel-Legged Robot Track (Autonomous)
We used a wheel-legged robot dog and achieved fully autonomous navigation through SLAM, reinforcement learning, and related methods.
{kind=link}
Robot Warrior Challenge 2026
Wheel-Legged Robot Group (Teleoperation)
{kind=link}
ICRA 2025 What Bimanuals Can Do (WBCD) Challenge
Hierarchical Bimanual Manipulation Policy for Dining Room Service
ManiSkill-ViTac 2025: Challenge on Manipulation Skill Learning With Vision and Tactile Sensing
Champion 🏆 in Track 2: Tactile-Vision-Fusion Manipulation (Certificate)
The First Place 🏆 in CVPR 2025 Embodied AI Workshop (Certificate)
TARS-STEIIA Team
Team Leader: Ruihai Wu
Instructor: Xiaoxiao Long
Members
Xiang Xiao*, Yuxing Qin*, Yuhang Zheng*, Xiangyu Chen
Projects

Humanoid Unitree G1 RL locomotion
Algorithm: Reinforcement Learning (PPO)
Simulation: Isaac Gym, Mujoco
I implemented reinforcement learning (PPO) algorithm using the rsl_rl library and Isaac Gym to train locomotion policy, and use Mujoco Simulation to test the policy.
Mobile Manipulation with Imitation Learning
GAIRLAB, City University of Hong Kong (CityU)
Imitation Learning(ACT)
Data Collection by Teleoperation System
Whole-Body Control
Wheel-legged Robot dynamics obstacle avoidance
Contribution:
Lidar-based SLAM (Cartographer)
Navigation (A* and TEB)
Wheel-legged Robot static obstacle avoidance
Contribution:
Lidar-based SLAM (Cartographer)
Navigation (A* and TEB)
Navigation in 3D Large-Scale Environment
DISCOVER Lab, AIR, Tsinghua University
Lidar-based SLAM (LIO-SAM)
Navigation (A* and TEB)
Leader-Follower Multi-Agent Swarm (Sim2Real Transfer)
DISCOVER Lab, AIR, Tsinghua University
Lidar-based SLAM (Cartographer)
Pure Pursuit algorithm
High stability and obstacle avoidance ability
Dynamics Obstacles Avoidance Indoor
DISCOVER Lab, AIR, Tsinghua University
Lidar-based SLAM (Cartographer), Vision-based SLAM (ORB_SLAM, RTAB_MAP)
Extended Kalman Filter (EKF)
Navigation (A* and TEB)
Cyberdog Navigation in indoor environment
DISCOVER Lab, AIR, Tsinghua University
Lidar-based SLAM (Cartographer)
Extended Kalman Filter (EKF)
Navigation (A* and TEB)
Cyberdog SLAM in indoor environment
DISCOVER Lab, AIR, Tsinghua University
Lidar-based SLAM (Cartographer)

Simulation
Slave Obstacle Avoidance
Artificial Potential Field Method
Wheeled-Legged Navigation
Industrial Collaboration
Cooperation with iFytek: VLM for Mobile Manipulation
The industrial compound mobile robot, enhanced by the capabilities of the Antelope Industrial Large Model in understanding computations, generating industrial code, and processing industrial text, can perform task comprehension, decomposition, instruction generation, and other operations through applications such as industrial task splitting, path code planning, and industrial object detection and image segmentation within a natural language interaction model. This further enhances the efficiency and effectiveness of industrial robots.
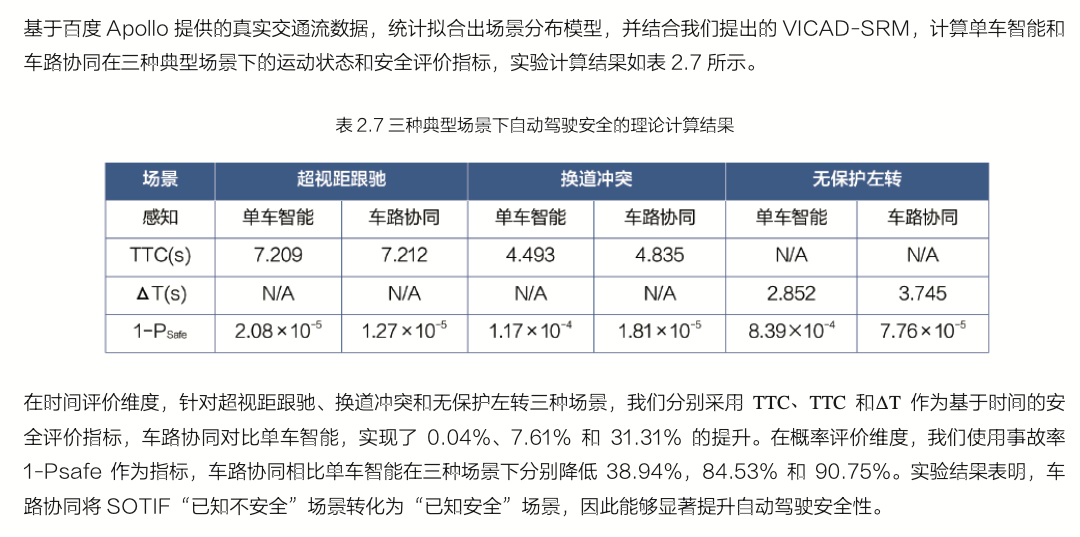
Baidu Apollo V2X Vehicle-Road Cooperative Technology Model Construction and Validation
Contribution & Results: we developed a safety model based on two scenarios: ring road conflicts and unprotected left turns, and evaluated the safety performances in both individual vehicle intelligence and V2X scenarios. The results indicate that V2X improved safety metrics by 30% to 90%.
Result: In collaboration with Baidu, contributed to the release of the first Chinese white paper on vehicle-road cooperative technology: Key technologies and prospects of vehicle-road collaboration for autonomous driving.
Awards
- City Special Prize, "Unbounded · 2023 Shanghai International Student (Nationalized University Students) Innovation and Entrepreneurship Competition"
- City Top 10, Best Popularity Award, Second and Third Prizes, 2020 and 2022 China-U.S. Maker Competition (Shanghai Regional)
- Third Prize, 2021 Cross-Strait Maker Competition National Finals
- City Second and Third Prizes, 2019 and 2022 Shanghai College Student Maker Competition
- First Prize (National Level), 2017 International Youth Innovation Design Competition China Region
Hobbies
Outside of research, I enjoy playing basketball .